

Ascential公司以攻克最复杂的工程难题为荣。近期,我们的团队为客户的诊断设备开发了一套尖端的龙门机器人校准系统——该设备的核心组件之一。龙门机器人是一种采用多轴框架结构的机械系统,能在广阔工作区域内执行精密运动。在此设备中,龙门机器人负责在多个精确位置间完成拾取与放置操作。
挑战:复杂系统中的精密校准
该分析仪面临重大挑战:其拾取放置龙门机器人需以近乎完美的精度在多个预设位置间移动物体。若校准稍有偏差,机器人便可能无法正确定位物体,导致操作效率低下甚至设备停机。传统手动校准过程耗时费力,不仅需要技术熟练的操作员,还存在较高的人为失误风险。该系统亟需一种更直观、可扩展且精确的方法来确保性能稳定。
我们的解决方案:计算机视觉
为应对这些挑战,我们的工程师实施了一套基于标记的位置追踪系统,该系统利用计算机视觉技术引导校准过程。其工作原理如下:
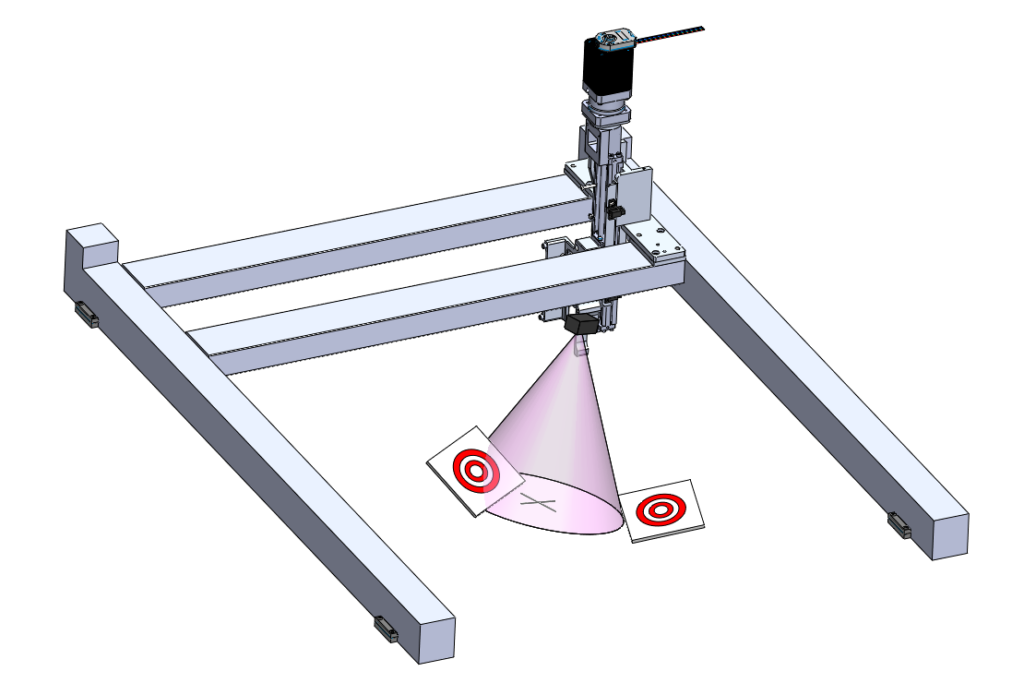
- 标记检测:系统采用安装在机器人夹爪上的标准USB摄像头。该摄像头用于检测放置在需要校准位置的标记。通过精密算法识别这些标记,系统得以确定物体相对于摄像头的精确位置。
- 姿态估计:一旦检测到标记点,系统便运用姿态估计技术,将标记点在摄像头视场中的位置转换为真实世界坐标。这使得龙门机器人能够理解其在更广阔环境中的位置,从而实现精确调整。
- 校准反馈:系统向操作员提供实时视觉反馈,同时显示标记点的当前位置与目标位置。通过直观的视觉界面引导操作员对齐标记点,确保校准过程简便快捷。系统采用十字线视觉标记实现精准对齐,并突出显示任何偏离目标位置的情况,便于进行精细调整。
- 数据存储与重复性:当达到最佳位置后,校准数据以微米级精度存储于系统内存。这确保机器人每次执行拾取放置任务时都能精确定位,显著提升设备精度并免除频繁重新校准的需求。此外,相较于以往的手动方法,该系统消除了操作员变量影响,从而实现了更优的重复性。
结果:准确性与效率的提升
通过实施该计算机视觉校准系统,Ascential为客户实现了以下关键效益:
- 精度提升:基于摄像头的对准过程比传统手动方法精确得多。通过使用标记点和实时反馈,机器人能够将物体持续定位在极其严格的公差范围内。
- 减少培训需求:系统直观的用户界面降低了对操作员和现场支持工程师的培训要求。借助可视化引导和自动反馈功能,操作员能够快速轻松地完成设备校准,确保设备始终处于待命状态。
- 更快的校准时间:自动化引导将系统校准时间缩短至原方法所需时间的一半以下,从而加快生产周期并最大限度减少停机时间。这在大批量生产环境中尤为显著。
- 全自动化潜力:该系统还为未来实现全自动化校准奠定了基础,进一步减少了人工干预需求,从而提升了效率。
该项目展示了Ascential如何凭借卓越的工程实力,打造兼具技术精准度与运营效率的解决方案。通过采用先进的计算机视觉技术和标记点定位追踪技术开发定制校准系统,我们的客户成功降低了操作复杂度,提升了产品质量,并实现了生产流程的优化。
无论您是想自动化特定任务,还是开发全套系统,我们的工程团队都准备好为您的最复杂项目设计创新解决方案。
